

【原报告在线阅读和下载】:20260324【MKList.com】3月小鹏第二代VLA专题篇:2026年主流车企城市NOA试驾报告 | 四海读报
【迅雷批量下载】:链接:https://pan.xunlei.com/s/VOXJ23RJHhoECPL5FRrVathfA1 提取码:umqb
【夸克批量下载】:链接:https://pan.quark.cn/s/fe42cc605010 提取码:j4Vv
一、一段话总结
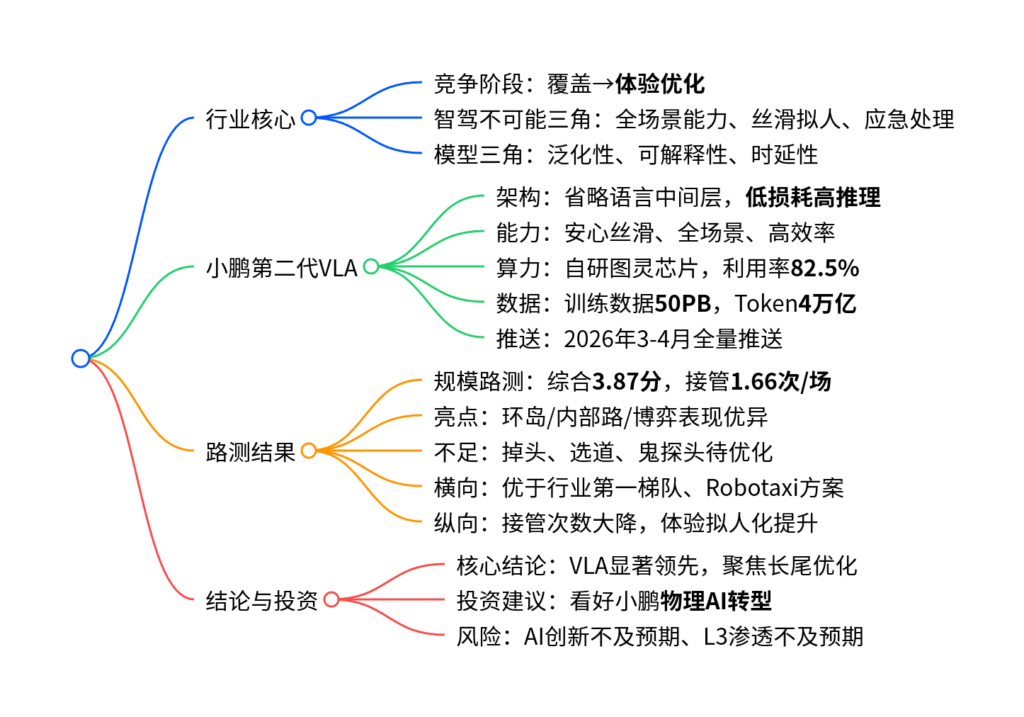
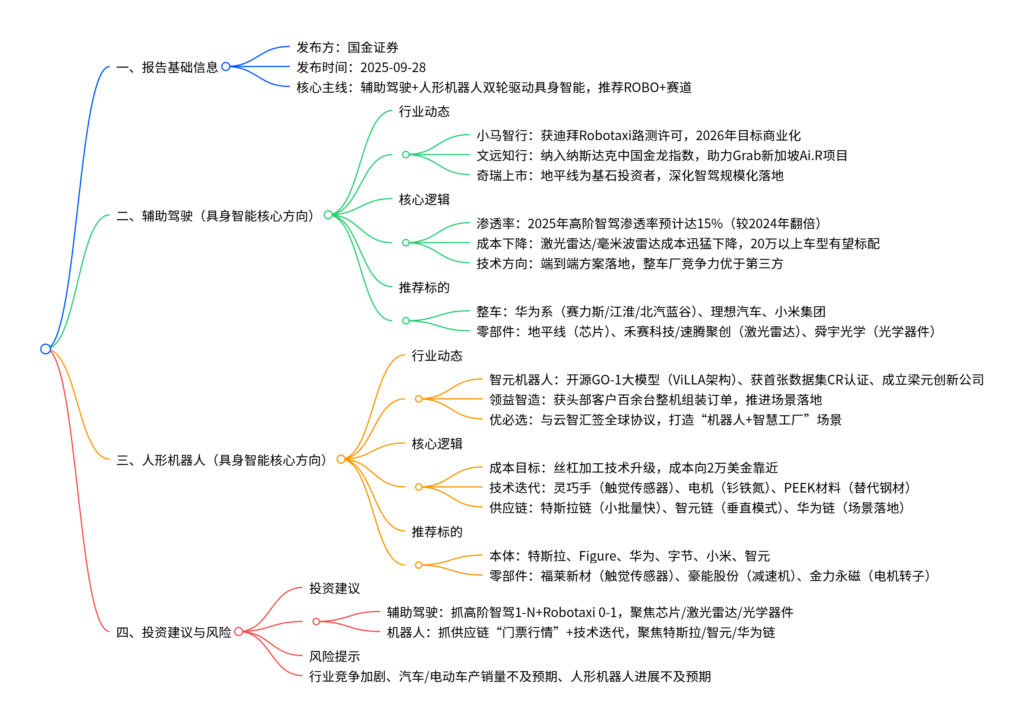
2026年城市NOA已从覆盖能力竞争转向体验优化竞争,行业提出智驾不可能三角(全场景能力/丝滑拟人/应急处理);小鹏第二代VLA通过架构革新实现全场景覆盖、丝滑拟人、效率提升三大突破,路测综合得分3.87分、平均接管1.66次/场,横向优于行业第一梯队与Robotaxi方案,纵向较前代接管次数大幅下降;报告看好小鹏向物理AI科技公司转型,大众成为其VLA商业化首批客户,行业后续核心优化方向为Corner Case处理。
二、思维导图
三、详细总结
1. 行业核心判断:城市NOA进入体验竞争阶段
- 行业阶段:2026年C端智驾从覆盖能力转向体验优化,主流厂商已落地环岛、无保护掉头、车位到车位等功能,核心优化方向为Corner Case处理。
- 智驾“不可能三角”(体验维度):全场景能力、丝滑拟人程度、应急处理能力,三者难以同时拉满。
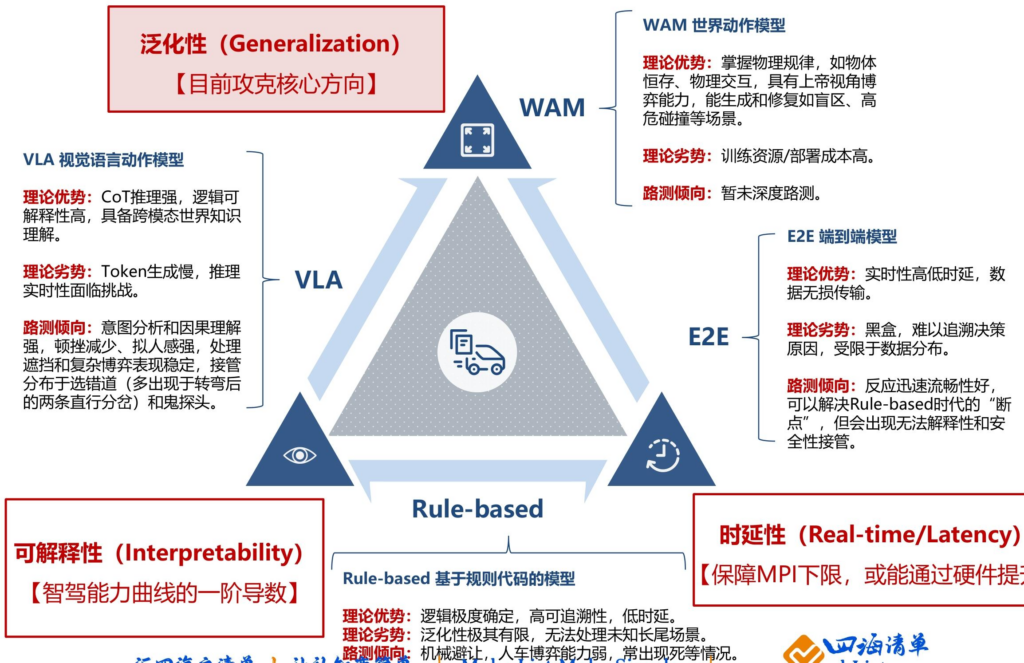
- 智驾“不可能三角”(模型维度):泛化性、可解释性、时延性,对应不同技术路线优劣。
| 模型路线 | 泛化性 | 可解释性 | 时延性 | 核心特点 |
|---|---|---|---|---|
| Rule-based | 低 | 高 | 优 | 机械决策,无法处理长尾 |
| E2E端到端 | 中 | 低 | 优 | 丝滑但黑盒,应急偏弱 |
| VLA | 高 | 高 | 中 | 推理强、拟人、博弈优秀 |
| WAM世界模型 | 高 | 中 | 中 | 物理预判,成本高 |
2. 小鹏第二代VLA核心架构与能力
-
架构革新:从标准VLA改为省略语言中间层,降低信息损耗,推理效率显著提升。
-
三大体验升级
- 安心丝滑:重刹减少99%、急加速减少98%、安全接管减少60%。
- 全场景能力:覆盖城市路/小区/窄路/施工/夜市,支持无导航漫游。
- 高效率:行车效率较L2提升23%,比肩老司机。
-
技术底座
- 模型:原生多模态物理大模型,32倍超密视觉思维链,误差降33%。
- 算力:自研图灵芯片,算力利用率82.5%,单颗≈10个Orin X。
- 数据:训练数据50PB,Token规模4万亿,车端日耗Token为全国数字AI80倍。
-
推送节奏:2026年3-4月全量推送,年内目标媲美FSD硅谷水平。
3. 路测实测结果(上海+广州)
-
规模路测(35场、260公里)
- 综合得分:3.87分
- 平均接管:1.66次/场
- 优势场景:环岛、内部路、博弈、平稳性
- 短板场景:掉头、分岔口选道、鬼探头
-
横向对比
- 对比行业第一梯队:小鹏接管2次,对手7次(以走错路为主)。
- 对比Robotaxi方案:小鹏更丝滑、效率更高,对手保守导致顿挫多、通行慢。
-
纵向对比(2024.5-2026.3)
- 接管次数:从3.2次/20km降至1次内/20km。
- 变化:接管从安全型转为效率型,行车更拟人。
4. 核心结论与投资建议
-
结论:小鹏第二代VLA综合体验行业领先,仍需优化选道与应急能力。
-
投资建议:坚定看好小鹏,从车企转向物理AI科技公司,大众为VLA首批客户,打开商业化第二曲线。
-
风险提示
- 全球AI技术创新低于预期
- 国内L3智能化渗透率低于预期
四、关键问题
问题1:什么是智驾“不可能三角”,小鹏第二代VLA如何平衡?
答案:体验维度不可能三角为全场景能力、丝滑拟人程度、应急处理能力;模型维度为泛化性、可解释性、时延性。小鹏第二代VLA通过省略语言中间层提升推理速度,用32倍超密思维链增强泛化与可解释性,优先平衡全场景+丝滑拟人,应急处理(鬼探头)为后续优化重点。
问题2:小鹏第二代VLA相比前代与竞品,核心优势体现在哪些数据与场景?
答案:核心优势:①体验数据:重刹-99%、急加速-98%、接管-60%、效率+23%;②场景能力:支持内部路、无导航漫游、环岛零接管;③横向对比:复杂路线接管2次远少于竞品7次;④纵向迭代:接管次数从3.2次降至1次内,更拟人更顺畅。
问题3:2026年城市NOA行业竞争焦点是什么,小鹏的商业化价值在哪?
答案:行业竞争焦点从“能不能开”变为好不好开、稳不稳、是否拟人,核心攻坚Corner Case与应急处理。小鹏商业化价值:①技术输出,大众成为第二代VLA首发客户;②转型物理AI公司,赋能C端整车、B端Robotaxi、机器人三大业务,打开估值与收入第二曲线。








暂无评论内容