

人形机器人系列报告(二):人形机器人末端执行器,灵巧手产业化加速落地
【原报告在线阅读和下载】:20251109【MKList.com】人形机器人系列报告(二):人形机器人末端执行器,灵巧手产业化加速落地 | 四海读报
【迅雷批量下载】:链接:https://pan.xunlei.com/s/VOXJ23RJHhoECPL5FRrVathfA1 提取码:umqb
【夸克批量下载】:链接:https://pan.quark.cn/s/fe42cc605010 提取码:j4Vv
1. 一段话总结
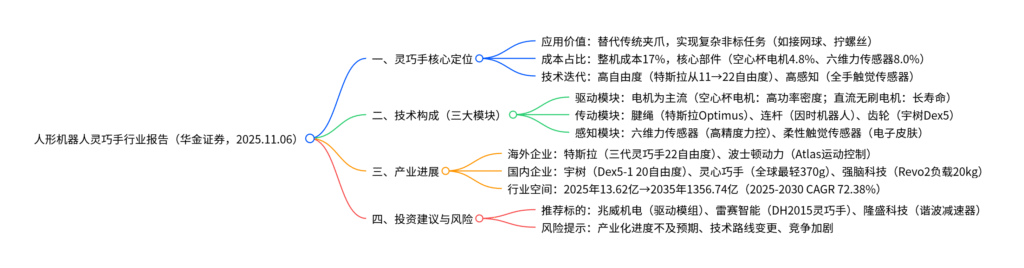
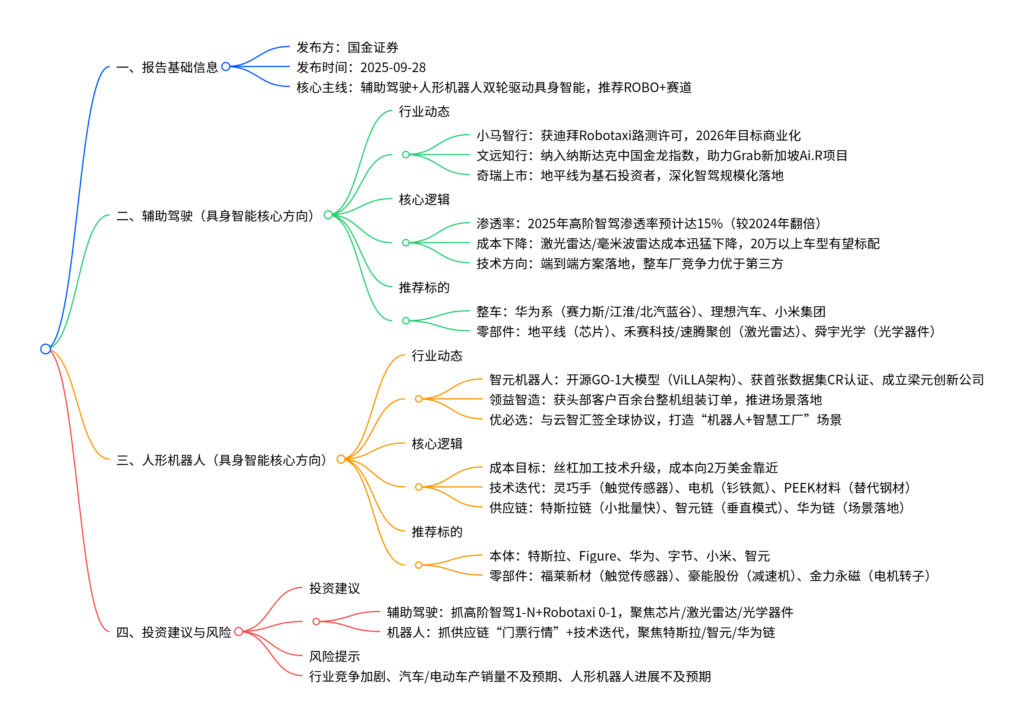
华金证券2025年11月6日发布的人形机器人系列报告(二)指出,2025年为人形机器人量产元年,灵巧手作为核心末端执行器,具备高自由度(特斯拉Optimus三代达22自由度)、高精度特点,占整机成本约17%(空心杯电机/六维力传感器分别占4.8%/8.0%),技术上由驱动(电机为主流)、传动(腱绳/连杆/齿轮多方案并存)、感知(六维力/柔性触觉传感器为核心) 三大模块构成;当前海内外企业(特斯拉、宇树科技、灵心巧手等)加速布局,产品从科研走向产业,预计2025/2030/2035年灵巧手行业空间达13.62/207.28/1356.74亿元(2025-2030年CAGR 72.38%);投资建议关注兆威机电、雷赛智能等在灵巧手及核心部件有布局的企业,风险提示产业化进度、技术路线变更等风险。
2. 思维导图(mindmap脑图)
3. 详细总结
一、灵巧手的核心定位:人形机器人“关键执行终端”
1. 应用层面:从“标准化”到“非标化”的突破
传统末端执行器(夹爪/夹持手)仅适配工业标准化流程(如汽车装配),自由度仅6个左右;而灵巧手通过模仿人手设计,需完成抓握鸡蛋、接网球等复杂非标任务,当前主流产品自由度达11-22个(特斯拉Optimus三代达22自由度),是人形机器人“人形概念具现”的核心部件。
| 对比维度 | 传统夹爪 | 灵巧手 |
|---|---|---|
| 自由度 | 约6个主动自由度,动作单一 | 11-22个自由度(特斯拉三代22个),支持拟人化操作 |
| 目标场景 | 工业标准化流程(汽车装配、物流搬运) | 复杂场景(医疗手术、家庭服务、动态抓取) |
| 成本 | 千元级别 | 数万元级别(特斯拉方案成本占整机17%) |
| 代表应用 | 智元远征A2-W工业机器人 | 特斯拉Optimus、宇树G1人形机器人 |
2. 成本层面:占整机17%,核心部件价值集中
以特斯拉Optimus为例,灵巧手成本占比达17.2%,为整机最高成本部件,其中核心子部件价值占比如下:
| 核心部件 | 成本占比(整机) | 功能作用 |
|---|---|---|
| 六维力传感器 | 8.0% | 实现力/力矩解耦,高精度力控 |
| 空心杯电机 | 4.8% | 提供高功率密度驱动,轻量化 |
| 行星减速器 | 1.8% | 提升扭矩,优化动力传输 |
| 蜗轮蜗杆 | 1.8% | 实现自锁,减少功耗 |
| 编码器 | 0.9% | 精准反馈位置信息 |
3. 迭代层面:自由度与感知能力双提升
- 自由度迭代:特斯拉Optimus从第一代11自由度(6主动+5被动)升级至第三代22自由度(17主动+5被动),单指负载达25kg;雷赛智能DH240旗舰型计划2026年推出,自由度达24个,支持33种手势。
- 感知能力迭代:从早期“力+位置传感器”(无触觉),到全手覆盖触觉传感器(如特斯拉三代集成AI视觉动态抓取),帕西尼DexH13 GEN2搭载1140颗触觉传感单元,定位精度达1mm。
二、灵巧手技术构成:驱动、传动、感知三大模块
1. 驱动模块:电机为主流方案
电机驱动因体积小、响应快、输出力矩稳定,成为灵巧手核心驱动方式,核心子部件为空心杯电机与直流无刷电机:
| 驱动类型 | 核心优势 | 适用场景 | 代表企业/产品 |
|---|---|---|---|
| 空心杯电机 | 无铁芯设计(无涡流损耗)、重量轻、精度高 | 高自由度灵巧手(如特斯拉Optimus) | 正元电机、兆威机电 |
| 直流无刷电机 | 长寿命(无电刷磨损)、高转速、转换效率高 | 中高负载灵巧手(如雷赛DH2015) | 雷赛智能、鸣志电器 |
| 液压驱动 | 扭矩大、适合重载 | 工业重型抓取 | 波士顿动力Atlas(早期) |
| 气压驱动 | 操作简便、成本低 | 简单抓持手 | 小型服务机器人 |
2. 传动模块:多方案并存,技术未收敛
当前传动路线分为腱绳、连杆、齿轮三类,各有优劣,适配不同场景:
| 传动方式 | 核心优势 | 核心劣势 | 代表企业/产品 |
|---|---|---|---|
| 腱绳传动 | 模拟人体肌腱、柔性高、可远距离传动 | 精度控制难、易磨损 | 特斯拉Optimus、灵心巧手L30腱驱版 |
| 连杆传动 | 刚性高、可高强度抓取、结构紧凑 | 自重较大、远距离控制难 | 因时机器人RH56DFX系列 |
| 齿轮传动 | 传动比稳定、效率高、可靠性强 | 体积/质量大 | 宇树Dex5-1、星动纪元XHAND1 |
3. 感知模块:六维力+柔性触觉为关键
-
六维力传感器:适用于力的作用点/方向随机变化场景(如机器人关节控制),可解耦各方向力与力矩,测量精度最高,代表企业为坤维科技。
-
柔性触觉传感器(电子皮肤):模仿人类皮肤,检测压力、温度、纹理等,按原理分为四类:
传感器类型 核心优势 代表材料 应用案例 压阻式 结构简单、能耗低、检测范围宽 碳材料、导电织物 强脑科技Revo2灵巧手 电容式 响应快、灵敏度高 碳基材料、水凝胶 帕西尼DexH13 GEN2 压电式 无需外接电源、自供电 压电陶瓷、PVDF 医疗康复灵巧手 摩擦电式 高灵敏度、自供电 极性摩擦材料 可穿戴触觉设备
三、产业进展:从科研到产业,产品百花齐放
1. 海内外企业布局情况
| 企业类型 | 代表企业 | 灵巧手产品亮点 | 量产进度 |
|---|---|---|---|
| 海外整机厂 | 特斯拉 | Optimus三代:22自由度、全手触觉、AI视觉 | 2025年内部测试,2026年对外销售 |
| 波士顿动力 | Atlas:高动态运动控制(翻转、跳跃) | 全电动版研发中,聚焦运动智能 | |
| 国内整机厂 | 宇树科技 | Dex5-1:20自由度、94个触觉传感器 | 2024年出货1500台,2025年增长 |
| 优必选 | Walker S2:11自由度、15kg托举 | 工业场景落地 | |
| 国内零部件厂 | 灵心巧手 | Linker Hand O6:全球最轻370g、6666元 | 量产千台,市占率超80% |
| 强脑科技 | Revo2:383g、负载20kg、OTA升级 | 2025年量产 | |
| 帕西尼感知 | DexH13 GEN2:16自由度、800万像素相机 | 批量交付物流/医疗场景 |
2. 行业空间测算:2035年突破1300亿元
基于“全球人形机器人销量增长+单价下降”假设(一台机器人配2只灵巧手),测算如下:
| 年份 | 全球人形机器人销量(万台) | 灵巧手单机价值(万元/台) | 灵巧手行业空间(亿元) | 同比增速 |
| — | — | — | — | — |
| 2025E | 1.24 | 5.49 | 13.62 | – |
| 2026E | 3.51 | 5.22 | 36.62 | 168.8% |
| 2027E | 5.36 | 4.69 | 50.33 | 37.4% |
| 2028E | 9.47 | 4.23 | 80.03 | 58.9% |
| 2029E | 19.10 | 3.59 | 137.20 | 71.4% |
| 2030E | 33.95 | 3.05 | 207.28 | 51.1% |
| 2035E | 500.81 | 1.35 | 1356.74 | – |
注:2025-2030年CAGR 72.38%,2030-2035年CAGR 45.61%
四、投资建议与风险提示
1. 投资建议:聚焦核心环节标的
| 环节 | 推荐标的 | 核心逻辑 |
|---|---|---|
| 灵巧手总成 | 兆威机电 | 17自由度灵巧手,核心驱动模组自研 |
| 雷赛智能 | DH2015高端型(20自由度),客户试用成功 | |
| 灵心巧手 | 全球高自由度市占率超80%,轻量化突破 | |
| 核心部件-驱动 | 鸣志电器 | 直流无刷电机龙头,运动控制技术领先 |
| 江苏雷利 | 空心杯电机产能布局,适配灵巧手需求 | |
| 核心部件-传动 | 隆盛科技 | 谐波减速器+灵巧手,技术链条完善 |
| 绿的谐波 | 谐波减速器国产替代,适配高精度传动 | |
| 核心部件-感知 | 柯力传感 | 六维力传感器领先,工业场景验证 |
| 速腾聚创 | 第二代灵巧手Papert 2.0,2025年量产 |
2. 风险提示
- 人形机器人产业化进度不及预期:若特斯拉、宇树等企业量产延迟,将直接影响灵巧手需求。
- 技术路线变更风险:传动(如新型材料替代腱绳)、感知(如AI视觉替代部分触觉)路线变化,可能导致现有产品迭代风险。
- 市场竞争加剧风险:海内外企业加速布局,可能引发价格战,压缩利润空间(如灵巧智能推出千元级产品)。
4. 关键问题
问题1:灵巧手作为人形机器人核心部件,其技术迭代的核心方向(自由度、感知)如何影响行业空间?当前有哪些关键技术突破支撑产业化落地?
答案:灵巧手技术迭代通过“拓展应用场景”直接拉动行业空间,关键技术突破从“性能+成本”双维度支撑产业化,具体如下:
-
技术迭代对行业空间的影响:
- 自由度提升:从11自由度(基础抓取)→22自由度(动态任务),使灵巧手从“工厂分拣”拓展至“家庭服务、医疗手术”,场景扩容带动需求增长(如特斯拉三代可接网球、弹乐器,打开消费级市场),预计2030年行业空间达207亿元(2025年13.62亿,CAGR 72.38%)。
- 感知能力升级:从“力+位置传感”→“全手触觉+AI视觉”,提升操作精度(如帕西尼DexH13 GEN2定位精度1mm),适配半导体装配、精密检测等高价值场景,单台灵巧手价值量从5万元→8万元(高端场景),进一步放大行业空间。
-
支撑产业化的关键技术突破:
- 驱动端:空心杯电机无铁芯设计(正元电机)降低能耗30%,直流无刷电机寿命提升至1万小时(雷赛智能),解决“轻量化+长寿命”痛点;
- 传动端:腱绳材料升级为UHMWPE(强度13倍于钢),磨损率下降50%(灵心巧手),连杆传动采用航空级铝材(星动纪元),自重降低20%;
- 感知端:柔性触觉传感器成本从千元→百元(傲意科技ROH-LiteS),六维力传感器精度达0.05N(坤维科技),突破“高成本+低精度”瓶颈。
问题2:当前灵巧手传动路线(腱绳/连杆/齿轮)未收敛,三类方案的适用场景、竞争优势及代表企业如何?未来哪种方案更可能成为主流?
答案:三类传动方案因特性差异适配不同场景,短期多方案并存,长期腱绳传动更易成为主流,具体分析如下:
| 传动方案 | 适用场景 | 竞争优势 | 代表企业/产品 | 核心短板 |
|---|---|---|---|---|
| 腱绳传动 | 消费级/轻量工业(家庭服务、精密抓取) | 柔性高、可远距离传动、轻量化(灵心巧手O6仅370g) | 特斯拉Optimus、灵心巧手L30 | 精度控制难、易磨损 |
| 连杆传动 | 重载工业(物流搬运、重型装配) | 刚性高、抓握力强(因时RH56DFX抓握1.5kg)、结构简单 | 因时机器人、隆盛科技 | 自重较大(540g+)、灵活性低 |
| 齿轮传动 | 高精度工业(半导体装配、拧螺丝) | 传动比稳定、精度高(宇树Dex5-1重复定位±1mm) | 宇树科技Dex5-1、星动纪元XHAND1 | 体积大、成本高 |
未来主流判断:腱绳传动更可能成为主流,核心逻辑:
- 场景适配广:人形机器人长期目标是“融入人类生活”,消费级场景(家庭、医疗)需求占比将超50%,腱绳传动的柔性、轻量化更适配;
- 技术优化快:UHMWPE腱绳(耐磨)、张力感知算法(精度控制)持续突破,短板逐步弥补(如特斯拉三代采用“丝杠+腱绳”复合传动,效率提升20%);
- 成本优势显:腱绳传动驱动器可外移至前臂,减少手部电机数量(特斯拉三代执行器外移,成本降15%),更符合产业化降本需求。
问题3:从行业空间测算看,2025-2035年灵巧手复合增速超45%,驱动行业高增的核心变量是什么?当前存在哪些风险可能导致实际增速不及预期?
答案:驱动灵巧手行业高增的核心变量集中在“需求端放量+成本端下降”,而产业化进度、技术路线等风险可能拖累增速,具体如下:
-
核心驱动变量:
- 变量1:人形机器人量产放量(需求端)。特斯拉计划2026年末量产Optimus(目标年产能100万台),国内宇树、智元2025年出货量预计超5000台,按“一台机器人配2只灵巧手”测算,2030年全球灵巧手需求达67.9万台(2025年2.48万台),需求CAGR 72%,直接拉动行业空间。
- 变量2:灵巧手成本下降(供给端)。核心部件(空心杯电机、触觉传感器)国产化替代加速,成本从2025年5.49万元/台→2035年1.35万元/台(CAGR -12%),打开中低端场景(如教育、农业),进一步放大需求。
- 变量3:应用场景拓展(需求端)。从工业(工厂分拣)→消费(家庭服务)→医疗(手术辅助),高价值场景占比提升(医疗场景单台价值量超10万元),推动行业空间从“量增”向“量价齐升”转变。
-
潜在风险(增速不及预期):
- 风险1:人形机器人产业化延迟。若特斯拉、Figure AI等企业因技术瓶颈(如运动控制、电池续航)推迟量产,2030年全球机器人销量可能从33.95万台降至20万台,灵巧手行业空间将缩水至122亿元(原207亿元)。
- 风险2:技术路线颠覆。若“软体机器人”(上海交大研发)替代传统灵巧手,现有传动、驱动技术路线失效,头部企业(如特斯拉、灵心巧手)需重新研发,导致产业化进度滞后2-3年。
- 风险3:价格战压缩利润。国内企业(如灵巧智能)推出千元级灵巧手,可能引发中低端市场价格战,导致行业整体利润率从20%降至10%,企业扩产意愿下降,拖累供给增速。









暂无评论内容